


CAN总线通信协议,即控制器局域网总线(Controller Area Network)协议,是一种用于实时应用的串行通讯协议总线。以下是对CAN总线通信协议的详细介绍:
一、基本概念
l报文:CAN总线上传输的信息以不同格式的报文发送,但长度有限。当总线空闲时,任何一个网络上的节点都可以发送报文。
l信息路由:在CAN中,节点不使用任何关于系统配置的报文,比如站地址,而是由接收节点根据报文本身特征判断是否接收这帧信息。
l位速率:CAN总线的位速率根据系统的不同而不同。但在一个给定的系统里,位传输速率是唯一的,并且是固定的。
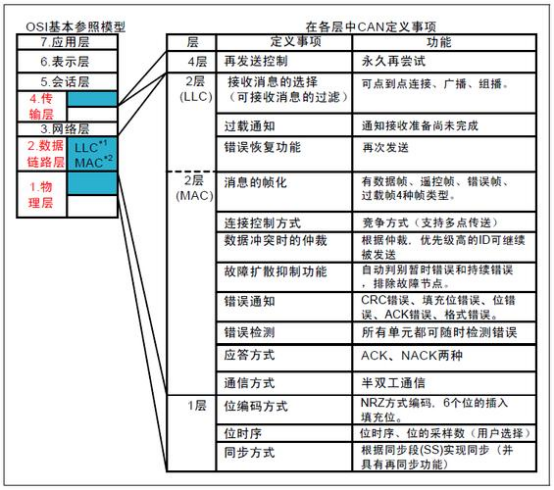
二、协议特点
l多主工作方式:总线空闲时,所有单元都可以发送消息。当两个以上单元同时开始发送消息时,根据标识符(ID)决定优先级,对ID的每个位进行逐个仲裁比较,优先级高的继续发送消息,仲裁优先级低的停止发送而进行接收工作。
l通信速率快:CAN通信速率较快,通信距离远。最高1Mbps(距离小于40m),最远可达10KM(速率低于5Kbps)。
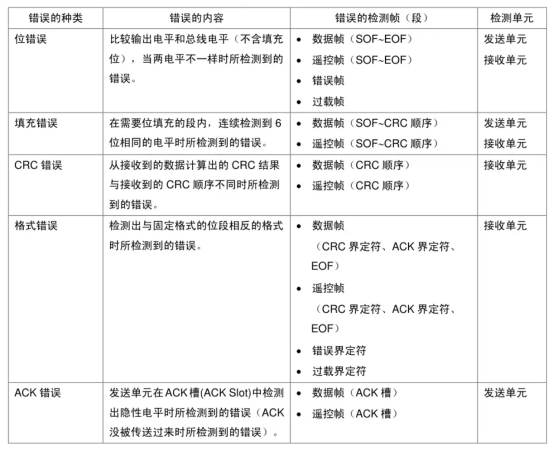
l错误检测与处理:CAN总线内置多种错误检测机制,包括CRC校验、位填充、帧校验和应答错误等。所有单元都可以检测错误,检测出错误的单元会立即同时通知其他所有单元。正在发送消息的单元一旦检测出错误,会强制结束当前的发送;强制结束发送的单元会不断反复重新发送此消息直到成功发送为止。
l实时性强:CAN总线协议能够满足实时应用的需求,具有很高的实时性能。
l抗干扰能力强:CAN总线使用双绞线进行差分电压传输,提高了信号传输的抗干扰性,减小了误差和噪声带来的干扰。
三、报文类型与帧结构
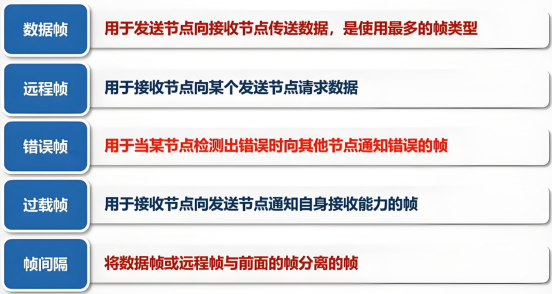
CAN总线协议中的报文类型主要包括数据帧、远程帧、错误帧和过载帧。其中,数据帧是CAN总线协议中最常见的一种类型,用于发送单元向接收单元传送数据。数据帧又可以分为标准帧和扩展帧,扩展帧主要就是仲裁段和控制段有一定的扩展,其余都与标准帧相同。

(数据帧结构)
帧结构方面,以数据帧为例,其结构包括帧起始、仲裁段、控制段、数据段、CRC段和ACK段等部分。其中,仲裁段用于仲裁该帧优先级的段,数据段用于传输实际的数据内容,CRC段用于检查帧传输错误,ACK段用于表示接收方是否成功接收到数据。
四、应用领域
CAN总线协议因其高效、可靠的特点而被广泛应用于各个领域:

l汽车领域:CAN总线协议最初就是为了满足汽车内部ECU之间可靠通信的需求而发明的,因此它在汽车领域的应用最为广泛。通过CAN总线,车辆中的各个控制单元可以实现高效、稳定的数据交换,从而实现车辆的智能化、高效化控制。
l工业自动化领域:CAN总线协议也广泛应用于工业自动化领域,用于实现机器人、物流设备、生产线等各种设备之间的通信与控制。
l航空领域:CAN总线协议也应用于航空领域,例如用于控制飞行器的各种子系统。
l船舶领域:在船舶领域,CAN总线协议被用于实现船舶各种设备的可靠通信。
l智能家居与智能医疗:CAN总线协议还可以应用于智能家居和智能医疗领域,连接各种智能设备和医疗设备,实现设备的互联互通和快速通信。
综上所述,CAN总线通信协议是一种高效、可靠的通讯协议,具有广泛的应用前景和重要的应用价值。
了解更多物联网知识和产品:进入塔石物联网
塔石专注于物联网信息产品的开发、生产、销售和技术服务。自2017年成立以来,已推出DTU、串口服务器、RTU、工业路由器/网关、传感器、模块模组6大系列两百多款产品,经过多年的技术沉淀及理论创新,除了成熟的工业设备,我们还为客户提供专业的方案定制和技术支持。



